Himel Rahman
Himel Rahman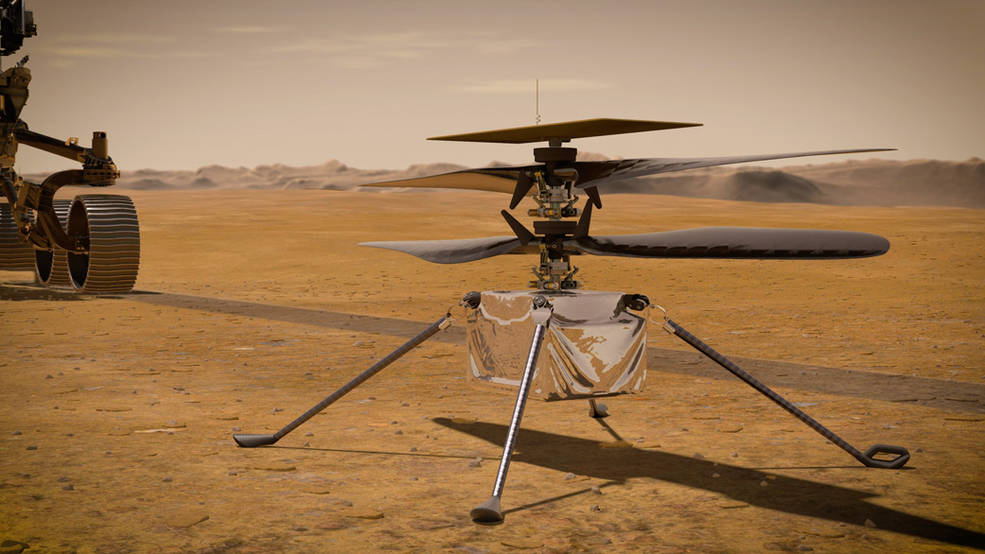
আজ থেকে ১০০ বছর আগে যদি পৃথিবীর কোনো সাধারণ মানুষকে বলা হতো যে, মঙ্গলগ্রহের বুকে পৃথিবী থেকে নিয়ন্ত্রিত একটি হেলিকপ্টার উড়ানো সম্ভব, তাহলে সে নির্ঘাৎ এটাকে হেসে উড়িয়ে দিত, কিংবা যে এই কথা বলেছে, তার মানসিক সুস্থতা নিয়ে সন্দেহ প্রকাশ করত। কারণ তখন মঙ্গলগ্রহে অভিযান চালানো তো দূরের কথা, পৃথিবীতে হেলিকপ্টার নামক আকাশযানটির উৎপাদনই শুরু হয়নি। অথচ এর ঠিক ১০০ বছরের মধ্যেই মার্কিন মহাকাশ সংস্থা নাসার তৈরি ক্ষুদ্র চালকবিহীন হেলিকপ্টার ইনজেনুইটি মঙ্গল গ্রহের বুকে উড্ডয়ন করল। ২০২১ সালের ১৯ এপ্রিল ইনজেনুইটি মঙ্গলগ্রহের পৃষ্ঠ থেকে ৩ মিটার (বা ৯.৮ ফুট) উঁচুতে উড্ডয়ন করে এবং ৩৯.১ সেকেন্ড ভেসে থাকতে সক্ষম হয়। ইনজেনুইটির জন্য এটি একটি ক্ষুদ্র পদক্ষেপ, কিন্তু মানবজাতির জন্য বিরাট এক অগ্রগতি।
ইনজেনুইটি মঙ্গলগ্রহের পৃষ্ঠ থেকে মাত্র ৩ মিটার উপরে উড্ডয়ন করতে পেরেছে এবং মাত্র ৩৯.১ সেকেন্ড ভেসে থাকতে পেরেছে। আপাতদৃষ্টিতে এটিকে কোনো কৃতিত্ব বলে মনে হওয়ার কথা নয়। মঙ্গলগ্রহের মাধ্যাকর্ষণ বল পৃথিবীর মাধ্যাকর্ষণ বলের প্রায় এক–তৃতীয়াংশ, কিন্তু মঙ্গলগ্রহের বায়ুমণ্ডলের ঘনত্ব পৃথিবীর বায়ুমণ্ডলের ঘনত্বের ১০০ ভাগের ১ ভাগ মাত্র। ফলে পৃথিবীর তুলনায় মঙ্গলগ্রহে কোনো আকাশযানের উড্ডয়ন বহুগুণে কঠিন।
মঙ্গলগ্রহে কোনো আকাশযানের ভূমি থেকে উড্ডয়ন করতে সক্ষম হওয়া আর পৃথিবীতে কোনো আকাশযানের ভূপৃষ্ঠ থেকে ৩০,০০০ মিটার (বা ১,০০,০০০ ফুট) উচ্চতায় পৌঁছানো সমতুল্য। এখন পর্যন্ত পৃথিবীতে কোনো হেলিকপ্টার ভূপৃষ্ঠ থেকে ৩০,০০০ মিটার উঁচুতে উঠতে পারেনি। কিন্তু ইনজেনুইটি মঙ্গলগ্রহের পৃষ্ঠ থেকে উড্ডয়ন করতে সক্ষম হয়েছে। এজন্য এটি কোনো সাধারণ কৃতিত্ব নয়, বরং মহাকাশ প্রযুক্তির ইতিহাসে একটি অনন্যসাধারণ অর্জন।

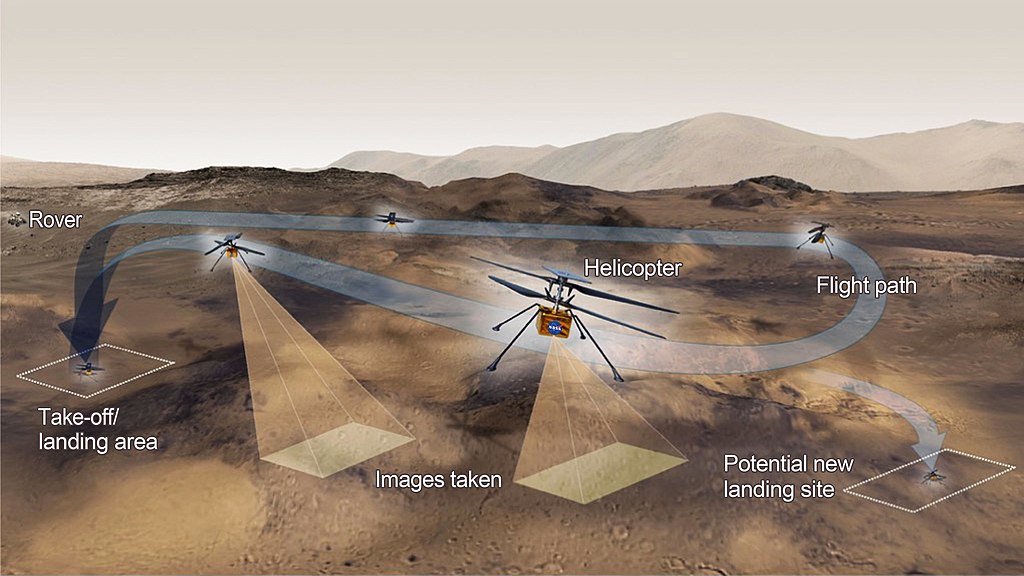
মঙ্গল গ্রহে ইনজেনুইটির উড্ডয়ন কার্যত একটি ‘প্রযুক্তি প্রদর্শন’ (technology demonstration)। অর্থাৎ, এটি কোনো পূর্ণাঙ্গ প্রযুক্তি নয়, বরং অনাগত প্রযুক্তির একটি পরীক্ষামূলক সংস্করণ বা প্রোটোটাইপ মাত্র। এই প্রোটোটাইপের ভিত্তিতে পরবর্তীতে বেশি উঁচুতে এবং বেশি সময় ধরে মঙ্গলগ্রহে উড্ডয়নে সক্ষম আকাশযান তৈরি করা হবে। এ ধরনের স্বয়ংক্রিয় আকাশযানের সাহায্যে মঙ্গলগ্রহের বিভিন্ন স্থান পর্যবেক্ষণ করা হবে এবং মঙ্গল্পগ্রহে প্রেরিত স্থলযান বা রোভারগুলোর চলার পথ নির্ধারণ করা হবে, এমনটিই নাসার পরিকল্পনা।
মঙ্গলগ্রহ অভিযান এবং ইনজেনুইটির নির্মাণ ইতিহাস
১৯৬০–এর দশকে মার্কিন যুক্তরাষ্ট্র ও সোভিয়েত ইউনিয়ন ভিনগ্রহে অভিযান চালাতে শুরু করে। ১৯৮৫ সালে সোভিয়েত মহাকাশযান ‘ভেগা–১’ শুক্র গ্রহে একটি বেলুন উড্ডয়ন করতে সক্ষম হয় এবং এটি ছিল ভিনগ্রহে পরিচালিত প্রথম আনপাওয়ার্ড ফ্লাইট (unpowered flight)। পরবর্তীতে অবশ্য সোভিয়েত ইউনিয়ন এই প্রকল্প থেকে একরকম ছিটকে পড়ে, কিন্তু মার্কিন যুক্তরাষ্ট্র মঙ্গলগ্রহে অভিযান চালানো অব্যাহত রাখে। মার্কিন মহাকাশ সংস্থা ‘ন্যাশনাল অ্যারোনটিক্স অ্যান্ড স্পেস অ্যাডমিনিস্ট্রেশন’ (নাসা) ১৯৯৩ সালে ‘মার্স এক্সপ্লোরেশন প্রোগ্রাম’ গ্রহণ করে এবং তখন থেকে এই প্রোগ্রামের অধীনে তারা মঙ্গলগ্রহে বেশ কয়েকটি অভিযান পরিচালনা করেছে। এদের মধ্যে সর্বশেষ অভিযানটি হচ্ছে ‘মার্স ২০২০’ এবং ইনজেনুইটি হেলিকপ্টারটি এই অভিযানেরই অংশ।
২০১৪ সালে নাসার অন্তর্গত ‘জেট প্রোপালশন ল্যাবরেটরি’ (জেপিএল) ও মার্কিন প্রতিরক্ষা কোম্পানি ‘অ্যারোভায়রনমেন্ট’ মঙ্গলগ্রহে প্রেরিত রোভারের সঙ্গে একটি স্কাউট হেলিকপ্টার প্রেরণের পরিকল্পনা করে এবং হেলিকপ্টারটির নকশা প্রণয়ন করে। নাসার ‘অ্যামেস রিসার্চ সেন্টার’ এবং ‘ল্যাংলি রিসার্চ সেন্টার’ও গবেষণাকার্যে সহায়তা করে। প্রকল্পটির কার্যনির্বাহী কর্মকর্তা হলেন ডেইভ লেভেরি, প্রকল্প ব্যবস্থাপক হলেন মিমি অং এবং মুখ্য প্রকৌশলী হলেন বব বালারাম।
২০১৬ সালে মাঝামাঝি নাগাদ তারা হেলিকপ্টারটি নির্মাণের জন্য দেড় কোটি (বা ১৫ মিলিয়ন) মার্কিন ডলারের প্রয়োজন বলে মার্কিন সরকারকে জানায়। ২০১৭ সালের ডিসেম্বরের মধ্যে তারা সিমুলেশনের মাধ্যমে সৃষ্ট কৃত্রিম মঙ্গলগ্রহের পরিবেশে হেলিকপ্টারটির মডেল পরীক্ষা করে এবং উত্তর মেরুতেও এটির পরীক্ষানিরীক্ষা চালাতে থাকে। কিন্তু তখন পর্যন্ত মার্স ২০২০ মিশনে হেলিকপ্টারটিকে অন্তর্ভুক্ত করা হয়নি কিংবা এটির জন্য অর্থ বরাদ্দও করা হয়নি।
অবশেষে ২০১৮ সালের মার্চে মার্কিন সরকার এই প্রকল্পের জন্য ২ কোটি ৩০ লক্ষ (বা ২৩ মিলিয়ন) মার্কিন ডলার বরাদ্দ করে। ২০১৮ সালের ১১ মে ঘোষণা করা হয় যে, মার্স ২০২০ মিশনে অংশগ্রহণের জন্য হেলিকপ্টারটিকে প্রস্তুত করা সম্ভব। এরপর হেলিকপ্টারটিকে ব্যাপকভাবে পরীক্ষা–নিরীক্ষা (বিশেষত ফ্লাইট ডাইনামিক্স ও এনভায়রনমেন্ট টেস্টিং) করা হয় এবং ২০১৯ সালের আগস্টে এটিকে ‘পার্সিভিয়ারেন্স’ নামক মার্স রোভারের অন্তর্ভুক্ত করা হয়।
উল্লেখ্য, ‘মার্স রোভার’ বলতে মঙ্গলগ্রহের ভূমিতে চলাচলের উপযোগী যানকে বুঝায়। হেলিকপ্টারটির ভর মাত্র ১.৮ কিলোগ্রাম এবং জেপিএলের প্রদত্ত তথ্যানুযায়ী, এটি মঙ্গলগ্রহে মোট ৫ বার উড্ডয়ন করতে পারবে। এই হেলিকপ্টারটি নির্মাণ ও পরিচালনার জন্য নাসা মোট বিনিয়োগ করেছে প্রায় সাড়ে ৮ কোটি (বা ৮৫ মিলিয়ন) মার্কিন ডলার।
পরিকল্পনাকালে হেলিকপ্টারটিকে ‘মার্স হেলিকপ্টার স্কাউট’, ‘মার্স হেলিকপ্টার’ বা ‘জিনি’ নামে ডাকা হতো। পরবর্তীতে হেলিকপ্টারটির আনুষ্ঠানিক নামকরণের জন্য নাসা একটি প্রতিযোগিতার আয়োজন করে এবং ২০২০ সালের এপ্রিলে যুক্তরাষ্ট্রের অ্যালাবামা অঙ্গরাজ্যের একাদশ শ্রেণির ছাত্রী ভানিজা রুপানি এই প্রতিযোগিতায় বিজয়ী হয়। সে হেলিকপ্টারটির নামকরণ করে ‘ইনজেনুইটি’।
মঙ্গলগ্রহে ইনজেনুইটি
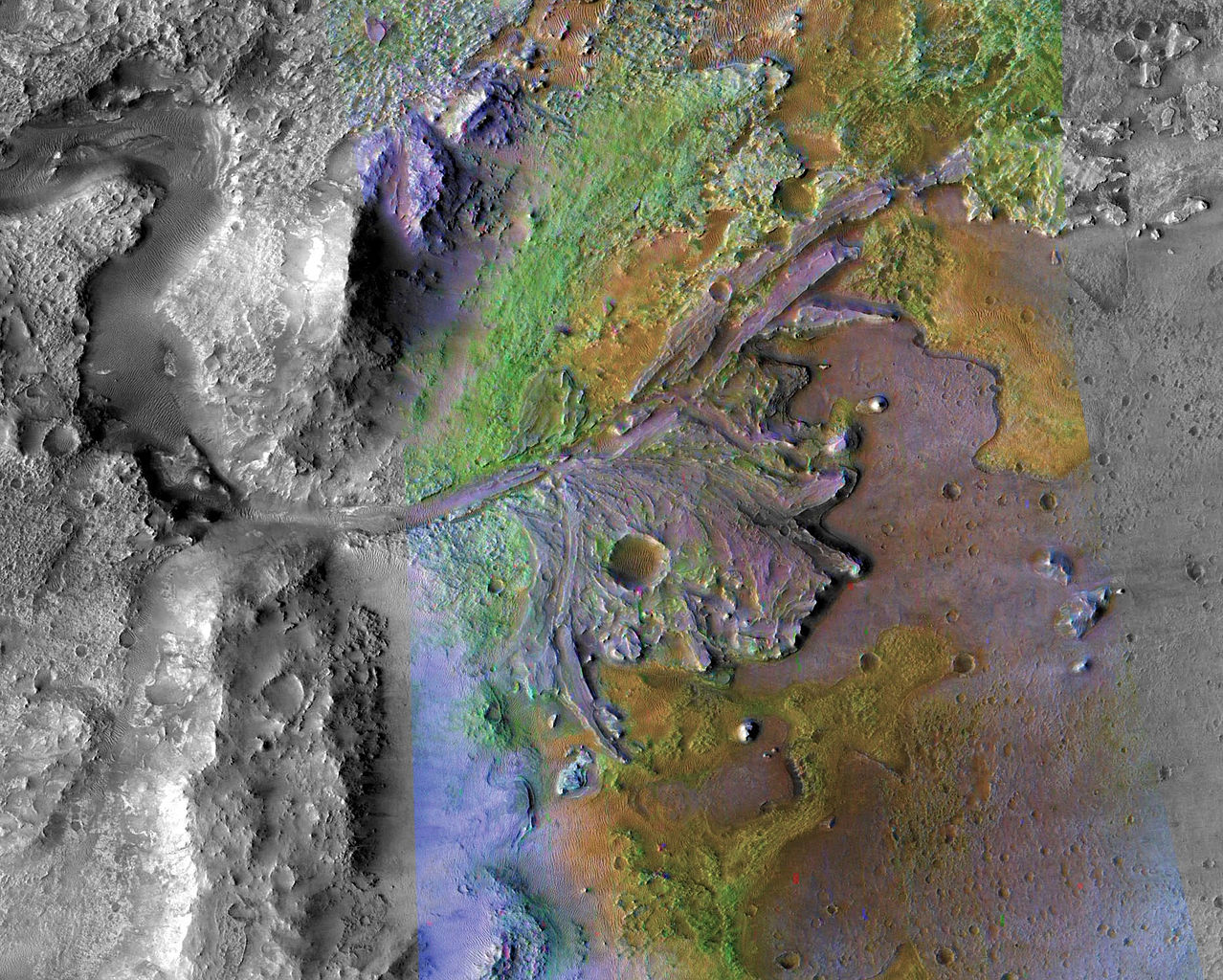
২০২০ সালের ৩০ জুলাই যুক্তরাষ্ট্রের ফ্লোরিডা অঙ্গরাজ্যের ‘কেপ ক্যানাভেরাল স্পেস ফোর্স স্টেশন’ থেকে একটি ‘অ্যাটলাস–৫’ লঞ্চ ভেহিকলে করে ‘মার্স ২০২০’ মিশনটিকে উৎক্ষেপণ করা হয়। মার্স ২০২০–এর অন্তর্ভুক্ত হচ্ছে মার্স রোভার ‘পার্সিভিয়ারেন্স’ এবং চালকবিহীন হেলিকপ্টার ‘ইনজেনুইটি’। ২০২১ সালের ১৮ ফেব্রুয়ারি রোভারটি মঙ্গলগ্রহের জেজেরো গহ্বরে অবতরণ করে। ২০২১ সালের ৫ মার্চ নাসা অবতরণস্থলটির নামকরণ করে ‘অক্টাভিয়া ই. বাটলার ল্যান্ডিং’। প্রখ্যাত মার্কিন বৈজ্ঞানিক কল্পকাহিনী লেখিকা অক্টাভিয়া ই. বাটলারের নামানুসারে এই নামকরণ করা হয়।
২০২১ সালের ৩ এপ্রিল ইনজেনুইটিকে ‘পার্সিভিয়ারেন্স’ থেকে নামিয়ে দেয়া হয়। হেলিকপ্টারটি নামিয়ে দেয়ার পর পার্সিভিয়ারেন্স সেটির কাছ থেকে প্রায় ১০০ মিটার (বা ৩৩০ ফুট) দূরে সরে যায় এবং একটি ‘বাফার জোন’ সৃষ্টি করে দেয়, যার মধ্যে হেলিকপ্টারটি নিরাপদে উড্ডয়ন করতে পারবে। একই দিনে হেলিকপ্টারটি মঙ্গলগ্রহের পৃষ্ঠের একটি ছবি তুলে পৃথিবীতে প্রেরণ করে। ৮ এপ্রিল ইনজেনুইটি একটি স্বল্পগতির ‘পাখা ঘূর্ণন পরীক্ষা’ (rotor spin test) সম্পন্ন করে। এ সময় ইনজেনুইটির পাখাগুলোর গতি ছিল ৫০ রেভোলিউশন/মিনিট। পরীক্ষাটি সফল হওয়ার পরবর্তী দিন অর্থাৎ ৯ এপ্রিল ইনজেনুইটি ক্ষিপ্রগতির ঘূর্ণন পরীক্ষা সম্পাদন করার চেষ্টা করে, কিন্তু ওয়াচডগ টাইমারের সময়সীমা অতিক্রান্ত হওয়ার ফলে পরীক্ষাটি ব্যর্থ হয়। উল্লেখ্য, অনাকাঙ্ক্ষিত পরিস্থিতিতে ভুল কার্যক্রম পরিচালনা থেকে হেলিকপ্টারটিকে রক্ষা করাই হচ্ছে এই ওয়াচডগ টাইমারটির কাজ।
১২ এপ্রিল নাসা কর্তৃপক্ষ ঘোষণা করে যে, একটি সফটওয়্যার আপডেট করার মাধ্যমে তারা সমস্যাটির সমাধান করেছে। ১৭ এপ্রিল ইনজেনুইটি সফলভাবে পূর্ণগতিতে ‘পাখা ঘূর্ণন পরীক্ষা’টি সম্পাদন করে। এই পরীক্ষাটিতে ইনজেনুইটি মঙ্গলগ্রহের পৃষ্ঠে অবস্থান করে ২,৪০০ রেভোলিউশন/মিনিট গতিতে তার পাখাগুলো ঘুরাতে সক্ষম হয়। অবশেষে ১৯ এপ্রিল হেলিকপ্টারটি প্রথমবারের মতো মঙ্গলগ্রহের পৃষ্ঠ থেকে উড্ডয়ন করে। এটির উড্ডয়নকাল ছিল ৩৯.১ সেকেন্ড। এটি প্রায় ৩ মিটার উঁচুতে উঠতে সক্ষম হয়, পূর্বপরিকল্পনা মোতাবেক ৯৬ ডিগ্রি ঘুরে ওঠে এবং এরপর অবতরণ করে। এভাবে সম্পন্ন হয় ভিনগ্রহে পরিচালিত প্রথম পাওয়ার্ড ফ্লাইট (powered flight)।
২২ এপ্রিল ইনজেনুইটি দ্বিতীয় বারের মতো মঙ্গলগ্রহের পৃষ্ঠ থেকে উড্ডয়ন করে। এবার ইনজেনুইটি রাইট ব্রাদার্স ফিল্ড থেকে প্রায় ৫ মিটার (বা ১৬ ফুট) উঁচুতে উঠতে সক্ষম হয় এবং ৫১.৯ সেকেন্ড ভেসে থাকতে সমর্থ হয়। এরপর এটি নিচে অবতরণ করে। দ্বিতীয় বারে ইনজেনুইটি প্রথম বারের তুলনায় বেশি উচ্চতায় উঠতে এবং বেশিক্ষণ ভেসে থাকতে সক্ষম হয়েছে।
এই স্বল্পস্থায়ী ফ্লাইট দুইটির সময় ইনজেনুইটি স্বয়ংক্রিয়ভাবে নিয়ন্ত্রিত হয়েছে এবং পৃথিবী থেকে জেপিএলের অপারেটররা টেলিরোবটিক প্রক্রিয়ায় এর পরিকল্পনা ও পরিচালনা করেছে। নাসার পরিকল্পনা অনুসারে, ৩০ সৌর দিনের মধ্যে ইনজেনুইটি আরো ৩ বার মঙ্গলের পৃষ্ঠ থেকে উড্ডয়ন করবে। প্রতিবার এটি ভূমি থেকে ৩–৫ মিটার (বা ১০–১৬ ফুট) উঁচুতে উঠবে এবং ৯০ সেকেন্ড পর্যন্ত সেই অবস্থায় থাকবে। প্রতি বার অবতরণের পর এটি সরাসরি পার্সিভিয়ারেন্স রোভারের সঙ্গে যোগাযোগ করবে।
মঙ্গল গ্রহে ইনজেনুইটির উড্ডয়ন হচ্ছে পৃথিবীর বাইরে প্রথম বারের মতো কোনো আকাশযানের উড্ডয়ন বা ‘পাওয়ার্ড ফ্লাইট’। স্বভাবতই এটি মহাকাশ অভিযানের ইতিহাসে এক নতুন যুগের সূচনা করেছে। নাসা ও জেপিএলের কর্মকর্তারা ইনজেনুইটির উড্ডয়নকে বর্ণনা করেছেন তাদের ‘রাইট ভ্রাতৃদ্বয় মুহূর্ত’ (Wright Brothers moment) হিসেবে বর্ণনা করেছেন। উল্লেখ্য, ১৯০৩ সালে রাইট ভ্রাতৃদ্বয় (উইলবার রাইট ও অরভিল রাইট) প্রথমবারের মতো পৃথিবীতে বিমান উড্ডয়নে সফল হয়েছিলেন। মজার ব্যাপার হচ্ছে, রাইট ভ্রাতৃদ্বয়ের প্রথম আকাশযান ‘রাইট ফ্লাইয়ার’–এর উইংক্লোথের একটি ক্ষুদ্র অংশ ইনজেনুইটির সৌর প্যানেলের নিচে একটি তারের সঙ্গে যুক্ত করা হয়েছে। ইনজেনুইটি যে স্থানটি থেকে উড্ডয়ন করেছে, নাসা সেটিকে ‘রাইট ব্রাদার্স ফিল্ড’ হিসেবে নামকরণ করেছে।
ইনজেনুইটির গঠনকাঠামো
ইনজেনুইটি হেলিকপ্টারটির উচ্চতা ০.৪৯ মিটার (বা ১ ফুট ৭ ইঞ্চি)। এটির সমাক্ষ পাখাগুলোর (coaxial rotors) ব্যাস প্রায় ১.২ মিটার (বা ৪ ফুট) এবং এগুলোর গতি ২,৪০০ রেভোল্যুশন/মিনিট। হেলিকপ্টারটি ৩০ সৌর দিনের মধ্যে ১ থেকে ৫ বার মঙ্গলগ্রহের পৃষ্ঠ থেকে উড্ডয়ন করতে সক্ষম। (উল্লেখ্য, মঙ্গলগ্রহের ১ দিন = ২৪ ঘণ্টা ৩৯ মিনিট ৩৬ সেকেন্ড) হেলিকপ্টারটি উড্ডয়নের পর সর্বোচ্চ ৯০ সেকেন্ড ভেসে থাকতে পারে। উল্লম্বভাবে উড্ডয়নকালে এটির সর্বোচ্চ গতি ৩ মিটার/সেকেন্ড। হেলিকপ্টারে ব্যবহৃত ব্যাটারির ক্ষমতা ৩৫–৪০ ওয়াট–ঘণ্টা (বা ১৩০–১৪০ কিলোজুল)।
ইনজেনুইটি মূলত একটি আকাশযান, কিন্তু এটিকে তৈরি করা হয়েছে এমনভাবে যাতে পৃথিবী থেকে উৎক্ষেপণের সময় এটি মাধ্যাকর্ষণ বল ও কম্পন সহ্য করতে পারে। এটিতে তেজষ্ক্রিয়তা–প্রতিরোধী ব্যবস্থাও রয়েছে, যেটি মঙ্গলগ্রহের অত্যন্ত শীতল আবহাওয়াতেও টিকে থাকতে সক্ষম। এতে রয়েছে একটি হাই রেজুলেশনের ক্যামেরা এবং ‘পার্সিভিয়ারেন্স’ রোভারে উপাত্ত সরবরাহ করার জন্য একটি যোগাযোগ ব্যবস্থা। মঙ্গলগ্রহের চৌম্বকক্ষেত্রের বৈসাদৃশ্যের কারণে সেখানে কম্পাস ব্যবহার করা সম্ভব নয়, এজন্য এটিতে একটি সোলার ট্র্যাকার ক্যামেরা ব্যবহার করা হয়। এই ক্যামেরাটি জেপিএলের ভিজুয়াল ইনার্শিয়াল নেভিগেশন সিস্টেমের সঙ্গে অঙ্গীভূত।
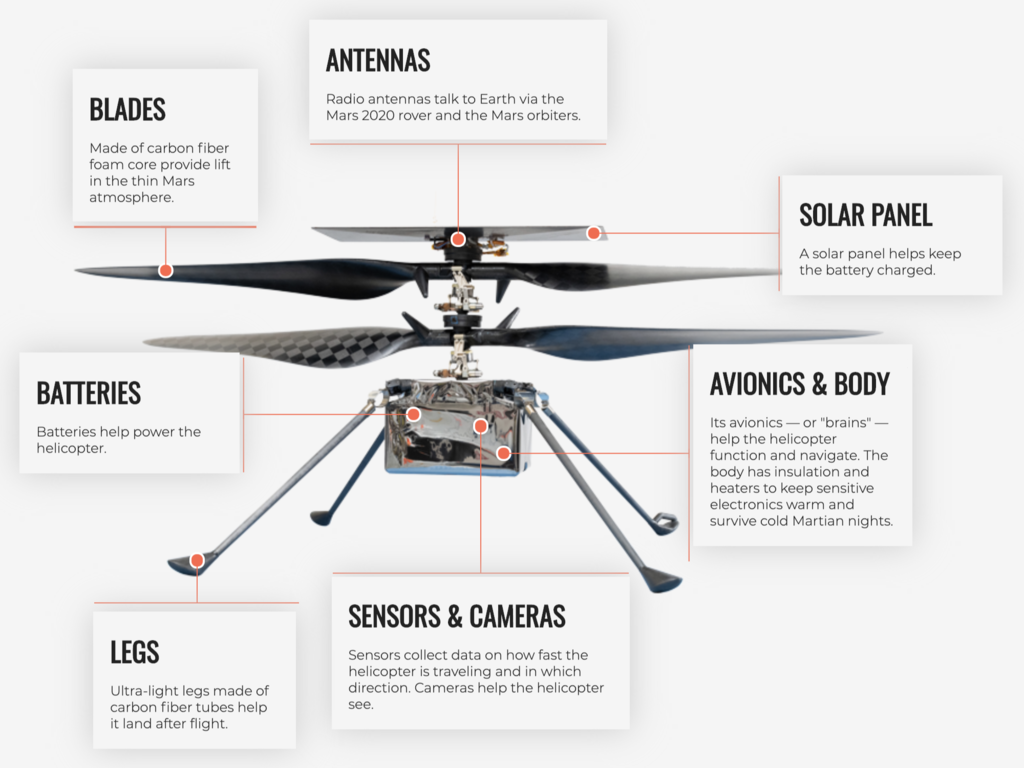
এছাড়া ইনজেনুইটিতে বেশকিছু অতিরিক্ত যন্ত্রপাতি রয়েছে। এগুলোর মধ্যে রয়েছে গাইরোস্কোপ, ভিজুয়াল ওডোমেট্রি, ইনক্লিনোমিটার, অ্যাল্টিমিটার এবং হ্যাজার্ড ডিটেক্টর। এটিকে এমনভাবে তৈরি করা হয়েছে, যাতে এটির ব্যাটারিগুলোকে রিচার্জ করার জন্য সৌর প্যানেল ব্যবহার করতে পারে। এজন্য ৬টি সনি লি–আয়ন কোষ ব্যবহার করা হয়েছে, যেগুলোর ক্ষমতা ৩৫–৪০ ওয়াট–ঘণ্টা।
হেলিকপ্টারটি লিনাক্স অপারেটিং সিস্টেম সংবলিত একটি কুয়ালকম স্ন্যাপড্রাগন ৮০১ প্রসেসর ব্যবহার করে। প্রসেসরটি দুইটি ফ্লাইট কন্ট্রোল মাইক্রোকন্ট্রোলার ইউনিটের সঙ্গে সংযুক্ত। এছাড়া এটি একটি আইএমইউ এবং একটি গারমিন লিডার লাইট ভি৩ লেজার অ্যাল্টিমিটার বহন করে। হেলিকপ্টার ও রোভারে ৯০০ মেগাহার্জ সাইফ্লেক্স ০২ চিপসেট রয়েছে এবং এগুলোর মাধ্যমে নিম্ন ক্ষমতাসম্পন্ন ‘জিগবি’ যোগাযোগ প্রোটোকল ব্যবহার করে হেলিকপ্টারটি রোভারের সঙ্গে বেতার যোগাযোগ করে থাকে। এই যোগাযোগ ব্যবস্থার মাধ্যমে ২৫০ কিলোবাইট/সেকেন্ড গতিতে ১,০০০ মিটার (বা ৩,৩০০ ফুট) দূরত্ব পর্যন্ত উপাত্ত সরবরাহ করা সম্ভব।
ভবিষ্যৎ
ইনজেনুইটি মূলত একটি প্রোটোটাইপ। এটির ভিত্তিতে পরবর্তীতে মঙ্গল ও অন্যান্য গ্রহে চলাচলের উপযুক্ত আকাশযান নির্মাণ করা হবে, এমনটিই ধারণা করা হচ্ছে। পরবর্তী প্রজন্মের হেলিকপ্টারগুলোর ভর ৫ থেকে ১৫ কিলোগ্রাম এবং ধারণক্ষমতা ০.৫ থেকে ১.৫ কিলোগ্রাম পর্যন্ত হতে পারে। এই আকাশযানগুলোর সাহায্যে ভবিষ্যতে ভিন্ন গ্রহগুলো বিস্তৃতভাবে পর্যবেক্ষণ করা যেতে পারে এবং এগুলোতে প্রাণ টিকে থাকার উপযোগী স্থানের সন্ধান পাওয়া যেতে পারে, এখনই এ রকম জল্পনাকল্পনা শুরু হয়ে গেছে। বস্তুত মঙ্গলগ্রহে ইনজেনুইটির উড্ডয়ন মানবজাতির জন্য বিরাট এক অগ্রগতি।